Log Week 5
Log Week 5
The overall idea is to detect whether there is any movement through the PIR infrared sensor. If there is movement detected, the code uses the ultrasonic sensor to measure the distance and calculate the velocity of the moving object. Once the object's speed exceeds a certain threshold and its motion direction passes the door lock multiple times, an alarm will be triggered with a sound alert.
The main purpose is to use infrared sensors to detect if someone is outside for an unusually long time. Ultrasonic sensors have been used to detect any unusual movements outside the door that are damaging the lock. The gyroscope checks if the lock is broken or not. It detects if an abnormal change in angle is produced, which indicates the lock is being broken. Currently we have chosen a threshold value of 20* for its abnormal angle, but of course this value may be debatable. These three sensors act as a kind of security system for our lock.
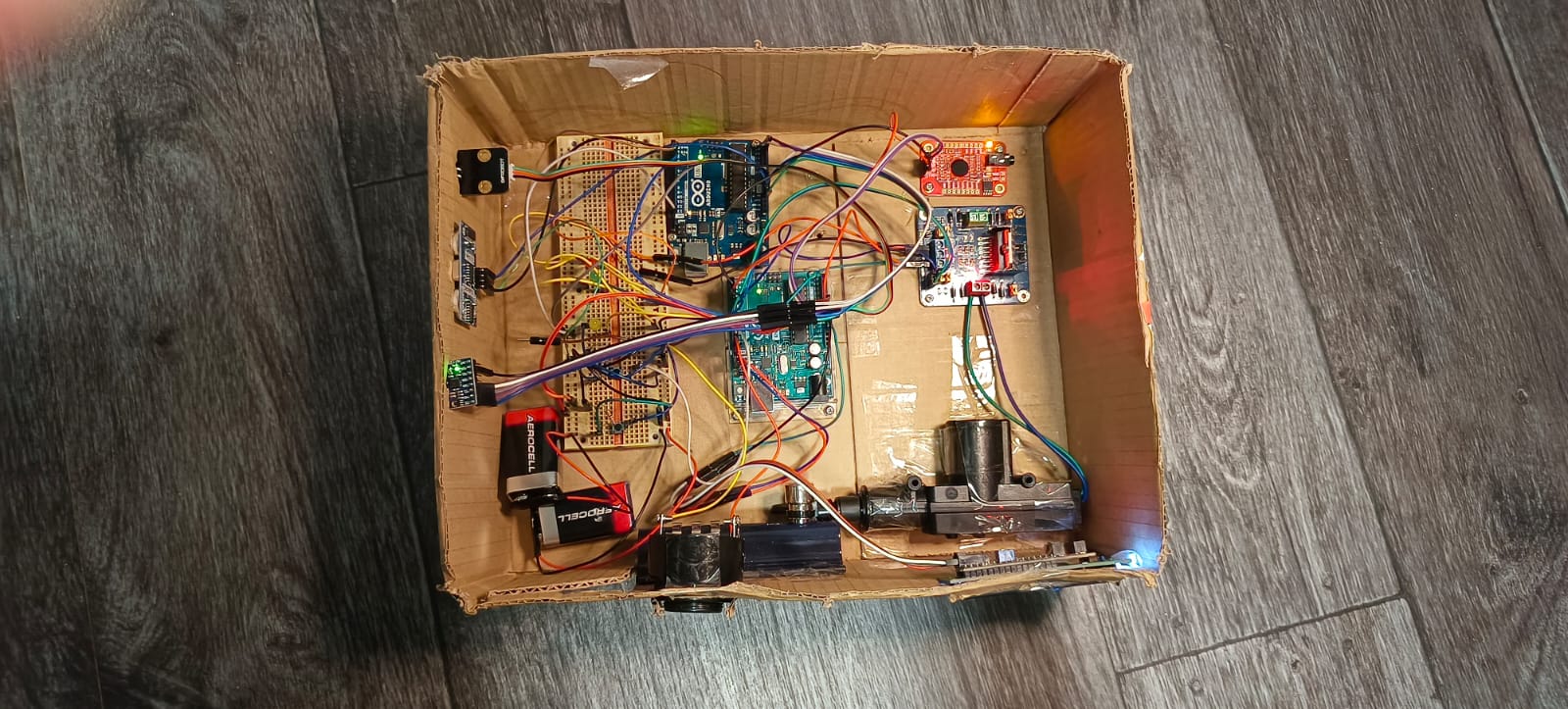

Final circuit

Final circuit diagram


Comments
Post a Comment